8.4 线段与多重直线
你会很开心的认识到,(多重)直线本质上来说和点列表是一样的。唯一的区别是我们把代表直线的点视为序列,而不是随机集合,这样我们就能在序列间画线了。这里有些小问题很容易导致翻车,我们最好现在就解决它。
在openNURBS™即Rhino内部有几种方法表现多重直线。有一个专门的多重直线类,只是一个简单的有序点列表。它没有额外开销数据,因此这是最简单的情况。当把常规Nurbs 曲线的阶数设置为 1 时,它们也可以表现为多重直线。此外,多重直线也可以由线段、多重直线、阶数为1的Nurbs曲线或上述曲线的组合构成。如果使用_Polyline命令创建多重直线,您将获得一个完美的多重直线对象,如左侧的"对象属性详细信息"对话框所示:
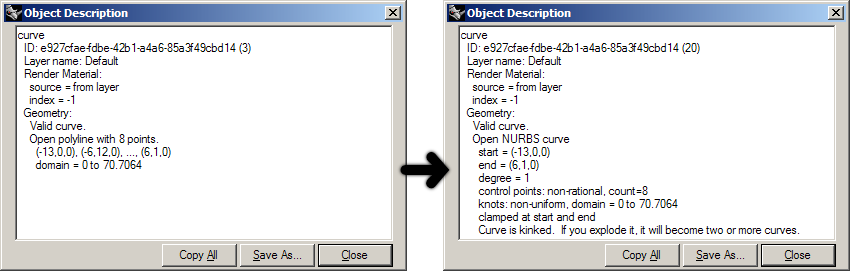
该对话框声明"具有 8 个点的开放多重直线"。但是,当我们拖动控制点时,Rhino会自动将任何曲线转换为Nurbs曲线,如右图所示。它现在是一个阶数为1的开放曲线。从几何角度来看,这两条曲线是相同的。从程序的角度来看,它们不是。目前,我们只会处理"合适"的多重直线;顺序坐标列表。为了便于澄清,我添加了两个示例函数,用于对折线点列表执行基本运算。
计算基于点数组的多重直线段的长度:
def PolylineLength(arrVertices):
PolylineLength = 0.0
for i in range(0,len(arrVertices)-1):
PolylineLength = PolylineLength + rs.Distance(arrVertices[i], arrVertices[i+1])
return PolylineLength
下面这段不是原文,自己练习,直接选取一条线段并计算长度。不需要提供点数组。
def pline_length():
crv_id = rs.GetObject('select a polyline', 4, True, True)
if not rs.IsPolyline(crv_id):
print('Not a polyline')
return
pline_len = 0.0
arr_vertices = rs.PolylineVertices(crv_id)
for i in range(0, len(arr_vertices) - 1):
pline_len += rs.Distance(arr_vertices[i], arr_vertices[i + 1])
return pline_len
通过在所有现有顶点之间添加额外的顶点来细分多重直线:
原文勘误
第3行:函数声明后没有冒号:
第15行:最后一点的索引是[len(arrV)-1]
第10行: 计算平均点括号使用混乱,本文已更正并运行通过

如您所知,两点之间的最短路径是一条直线。对于我们所有的空间定义,从\(R^1\)到\(R^N\)都是如此。但是,\(R^2\)空间中的最短路径不一定是\(R^3\)空间中的最短路径。如果我们想用\(R^2\)中的直线连接曲面上的两个点,我们需要做的就是通过曲面[u,v]空间绘制一条线性路线。(由于我们只能向 Rhino 添加使用 3D 世界坐标的曲线,因此我们需要相当数量的样点来给人以平滑度的印象。)上图中的红色粗曲线是连接 [A] 和 [B] 的\(R^2\)参数空间中的最短路径。我们可以清楚地看到,这绝对不是\(R^3\)空间中最短的路径。
暂时还没有高科技,但要为下一个例子做好准备......
我们可以清楚地看到这一点,因为我们已经习惯了\(R^3\)空间中发生的事情,这就是为什么整个\(R^2\) / \(R^3\)的事情从一开始就如此彻底地违反直觉。绿点虚线是\(R^3\)空间中的实际最短路径,它仍然尊从曲面的限制(即它可以投影到曲面上而不会丢失任何信息)。以下函数用于创建红色曲线;它创建一条多重直线,表示曲面参数空间中从 [A] 到 [B] 的最短路径:
| 行 | 描述 |
|---|---|
| 1 | 函数接收4个参数:绘制最短路径平面的ID,多重直线的段数,以及选择A、B选择点的两个提示。 |
| 1...3 | 提示用户选在曲面上择A点。如果未选择就跳出程序。 |
| 5...6 | 提示用户选在曲面上择B点。如果未选择就跳出程序。 |
| 10...11 | 投影A和B至曲面以取得\(R^2\)坐标uva 和 uvb。 |
| 13 | 声明保存多重直线所有顶点的列表。 |
| 14 | 因为算法基于分段,我们提前知道多重直线顶点的数量,进而也知道需要对曲面进行的采样次数。 |
| 15 | t在整个迭代过程中从0.0 增加至 1.0 |
| 16...17 | 使用当前t值在区间uvA至uvB.采样曲面。 |
| 18 | rs.EvaluateSurface() 接收{u}和{v}值,返回一个3D世界坐标。这是转换\(R^2\)坐标至\(R^3\)坐标的一个友好的方法。 |
我们要结合以上例子,在Rhino里写一个真正的测量路径程序。整个算法稍显复杂,我会尽我所能在真正写代码前解释清楚它的工作原理。
首先,在\(R^2\)空间生成一条[A]和[B]之间最短路径的多重直线。这是我们的基线。这条线只是粗略的近似线,只有10个分段。使用getr2pathonsurface()函数生成这条线。不幸的是那个程序对闭合曲面并没有作用。在Nurbs曲面章节再细说这个问题。
一旦得到基线,将进入迭代环节。迭代包含2个嵌套循环,我们用2个函数来做这个循环,以免产生太多的嵌套和缩进。除这上面说到的生成近似线函数,我们还需要写4个新函数:
- geodesiccurve() - 测量主程序
- ProjectPolyline() - 投影多重直线
- SmoothPolyline() - 平滑多重直线
- GeodesicFit() - 测地线(最短路径)
主程序 geodesiccurve() 的功能一如继往:收集原始输入数据,尽可能成功的完成程序主要功能。因为我们需要计算曲面上2点间的最短路径,原始输入数据就只包含了曲面ID和带曲面参数空间的2个点数据。寻找最短路径的算法相对来说速度很慢,它不太擅长对对密集多重直线进行重大更改。所以我们只能分批次传送数据。也是基于这个原因我们的初始多重直线(首次传送的数据)只有10段。我们会计算这10个分段的最短路径;然后把生成的多重直线再细分为20段,再计算最短路径;然后再分成40段,继续计算...这样迭代下去直到生成的细分段整体长度变化很小就停止迭代。
ProjectPolyline() 函数确保多重直线顶点的点数组都位于特定曲面之上。为了做到这一点必须把多重直线\(R^3\)坐标投影至曲面之上,然后把投影结果再转换回\(R^3\)空间。这叫‘拉回’。
SmoothPolyline() 会使用多重直线相邻顶点平均这条多重直线。这个函数和前面的例子相似,实现起来会很简单,因为函数处理的不是Nurbs曲线,不需要担心结点、权重、阶数和域会对结果造成影响。
GeodesicFit() 是生成最短路径需要的例程。函数把接收到的多重直线转换成可能的最短路径,不管输入的糟糕和错误程度。解决最短路径使用的算法非常幼稚,比Rhino内置命令_ShortPath慢很多。但是我们算法的也有一个好处,它能处理自交曲面。
算法内在原理和约束橡胶带仿真差不多,唯一的区别是不允许橡胶带离开曲面。内部过程是迭代式的,因此我们可以期望每多进行一次迭代就会比上一次产生更好的结果,迭代效果在接近完美解决方案附近会越来越小。一旦我们觉得效果改进已经可以忽略不计时,就停止迭代退出函数。
为了模拟橡胶带我们需要两个步骤:平滑和投影。首先我们允许橡胶带收缩(在[A]和[B]点间它总是倾向于收缩为直线)。在\(R^3\)空间的收缩意味着多重直线的顶点有可能脱离曲面。必须重新施加影响让顶点重回曲面。这两个操作由函数#2和#3完成。

上图描述了构成最短路径程序的单个迭代的两个步骤。黑色多重直线投影到曲面形成红色多重直线。红色曲线然后平滑化成绿色曲线。请注意实际算法中,这两个步骤是反向进行的:先平滑化,再投影。
从最简单的函数开始:
| 行 | 描述 |
|---|---|
| 1...3 | 因为只有本程序使用这个函数,我们可以不投影第一个和最后一个点。我们可以安全的假设多重直线是开放的,并且两个端点已经在曲线上了。 |
| 4 | 我们给出多重直线顶点坐标,向Rhino拿到曲面上投影最近点。不使用 rs.SurfaceClosestPoint() 的原因是 BRepClosestPoint() 会把修剪曲面计算在内。通过这个特性我们能得到好处。内置命令 _ShortPath 同样也不考虑修剪曲面的情况。我们当然不会对已经有的轮子有兴趣,我们需要做得更好。 |
| 5 | 如果 BRepClosestPoint() 返回值为Null,那么有地方存在问题。在这种情况下我们不能把顶点投影到曲面,所以最简单的方式是忽略它。出现这种错误时,当然也可以终止整个函数操作,但是我偏向于继续执行,看到最后到底会发生什么。 |
| 6 | BRepClosestPoint() 函数返回很多信息,不单单只是\(R^2\)坐标。实际上它返回的是一个数据元组,第一个元素是\(R^3\)坐标。这意味着我们不需要自己转换uv坐标到xyz坐标。太好了!直接赋值并继续下一步。 |
| 行 | 描述 |
|---|---|
| 1..3 &6..8 | 因为在整个平滑化过程中我们都需要原始坐标,所以不能直接对整个坐标组进行转换。所以在处理坐标前,我们需要对每个坐标进行一次复制。 |
| 9 | 这里进行的操作是对当前顶点('当前'由参数i定义)在x,y,z坐标方向上进行平均,使用当前坐标本身以及相邻的两个坐标。我们迭代所有内部顶点,同时添加Point3d物体,而不是分别指定x,y,z的值。写子函数不会让代码执行更快,但是这会让程序变得小巧。同时,这也让后面进行调整更容易,因为需要改动的地方不多。 |
上面提到的难点到了,实际执行寻找最短路径的函数:
| 行 | 描述 |
|---|---|
| 1 | 嗯...看起来不是很垃圾,对吧?你会发现通常很容易说明白的东西到最后写出的代码更多。精密的数学和逻辑结构写起代码来更高效。 |
| 2 | 我们会监控每次迭代过程,一旦发现曲线不再明显变短(‘明显’由参数tolerance定义),把当前计算的‘中间值’当成‘结果值’并终止程序执行。为了监控这个过程,程序需要记住每次开始迭代前曲线的长度:参数length服务于这个目的。 |
| 3 | 无论在哪里如果你看到不带任何标准跳出条件语句的while True:,就应该提高警惕了。这是一个潜在的无限循环。我已经相当彻底的测试过,它从来没运行超过120次。实验数据从来都不是无懈可击的,从理论上讲,程序可以进入一个在两个解决方案之间跳跃的稳定状态。如果发生了这种情况,循环就永远不会结束,变成死循环。当然如果你觉得需要,欢迎添加跳出条件语句 |
| 4...5 | 算法的主干,调用前面写的2个函数 |
| 6 | 计算新生成多重直线的长度 |
| 7 | 检查是否有必要继续迭代 |
| 8 | 如果需要继续运行,我们现在需要记住这个新的长度作为我们的参考值。 |
主程序需要解释一下。它执行很多不同任务,让一大堆代码看起来很难理解。可能更好的处理方式是把它分解成更多的小块,但是这个程序已经有7个子函数,我感觉到已经差不多了。记住把问题分解成更小的子问题是组织思维的一个好方式,但是它实际上并不能解决任何问题。你需要寻找一个分割和统一的平衡点。
原文勘误
原程序无法运行,原因是变量名混乱。vertices这个变量,有两个不同意义的值使用了这一个变量名。最后可运行的程序在末尾有下载。
| 行 | 描述 |
|---|---|
| 2...3 | 选择需要生成最短路径的工作曲面 |
| 5...6 | 声明存储多重直线顶点的变量。因为 getr2pathonsurface() 返回值已经是数组,声明时就不需要使用方括号指示这是一个数组了,前面的例子都是这么干的。 |
| 8 | 程序使用的限值是文档公差的10% |
| 9...12 | 这个循环也使用长度比较来决定是否继续进行循环。这里不比较多重直线在平滑/投影函数迭代后的长度,而是检测分段/寻找最短路径函数后长度的变化。目的是评估是否值得再继续进行迭代。变量length和newlength和上一页函数的作用一样。 |
| 13 | 在命令行显示信息以通知用户程序的进程。这个程序可能会行动一段时间,所以不要让用户觉得这玩意挂掉了。 |
| 14 | 调用子函数 geodesicfit() 。 |
| 16...17 | 比较长度有无变化,当变化长度小于限值时退出循环 |
| 18 | 安全保障。我可不想生成的曲线太密集了。 |
| 19 | 调用函数 subdividepolyline() 会让多重曲线顶点翻倍。新增点并不在曲面表面,把新生成的多重直线加入文件之前,必须确保至少调用一次函数 geodesicfit() 。 |
| 22...23 | 添加曲线并打印一条曲线长度信息 |
提供验证过的可运行程序下载 原来用hexo部署在gitee的文件都挂掉了。需要程序重新写。 8.4.py