8.6 圆、椭圆和弧线
在Rhino里,用户不会直接面对参数化物体,但是openNURBS™内核里有一部分数学原型是参数化存储的。例如圆柱、球体、圆、旋转体和sum-surface。看下图突出显示显式(参数化)和隐式圆的区别:

当通过程序在Rhino中添加圆,我们可以指定平面+半径,也可以指定3个点(程序内部会转换为平面+半径)。你可能记得圆和正弦波与余弦波有着紧密的联系,就是那些可爱的波浪线。接下来我们要写一个程序,在指定半径球体上封装指定半径的圆。在我给出答案之前,花1分钟好好想想这个问题。
最明显的解决方法是:在球体的水平带上开始堆圆,暂时忽略竖直带产生的干扰。如果你也想到了这个方法,并开始自我感觉良好的话,那么我告诉你别读接下来两句话。这个方法已经被人用了又用,但是不知道什么原因,Dave Rusin被认为是这个方法的发明人。即便Rusin的算法算不上什么黑科技,但是在我最后给出代码之前,讨论一下这里面的数学问题还是有价值的,以免造成混乱,至少是减少混乱。
Rusin的算法是这样工作的:
- 算出球体上,从北极点到南极点可以等距堆多少个圆。
- 算出环绕圆可以堆出多少条这样的圆形带。
- 完成
等一下,暂停。首先想一下球体是如何形成的。只有领悟了球体的特性,我们才能给它装上圆。在Rhino中,球体是旋转形成的,有两个极点和一条接缝:

北极点(左图黑点)和南极点(左图白点)都位于球体主轴,接缝(粗边缘)连接这两点。实质上,球体是由一个长方形平面两边弯曲,左边和右边重合形成接缝,上边和下边压缩为一点(极点)。我们应该很熟悉这个坐标系,因为地球用的就是这一套。地球以纬度和经度角度划分,球体以纬度和经度弧度划分。球体纬度弧度的数字域从南极点-½π开始,在赤道达到0.0,在北极点终止于½π。经度弧度域开始和结束都位于接缝上,环绕球体一周从0.0至2π。现在你应该知道它为什么叫‘接缝’了:它是弧度域从最小值突然跳变为最大值的地方。
我们不能像右图上那样在长方形上封装小正方形,因为在极点附近它们会严重变形,实际上你也看得到在极点附近它们真的变形了。我们希望封装的圆保持完美,这意味着要和球体的收敛性做斗争。

假设我们要封装的圆半径远远小于球体半径,至少有两个圆我们可以毫不犹豫的加上:南北极点各放一个。有个额外的好处是,现在这两个圆完美覆盖了极点,只剩下那条烦人的接缝没有处理了。然后接下来要干的活是,确定需要多少个圆能直接覆盖掉这条接缝。接缝的长度是球体周长的一半(左图黄色箭头)。
放松时间到,我们已经收集了要封装填充这个球体需要的所有信息。算法的最后一步是,从每一个在接缝上的圆开始,围绕球体堆积圆。我们需要计算球体上圆位置纬度的周长,用这个周长除以小圆直径,找到等于或小于结果的最大整数。原理的数学公式是:
想要给人留下深刻印象请背下这个公式...

| 行 | 描述 |
|---|---|
| 1...6 | 收集自定变量并确保数值有效。小于0.01单位的球体和圆半径大于球体半径½都是无效的。 |
| 8 | 计算两极点间圆的数量。 int() 函数接收浮点数,返回浮点数的整数部分。因此它总是向下舍入。 |
| 11...12 16...17 | phi和theta (Φ 和 Θ)通常用于表示球面空间的角度,通过符号形状不难看出来。我们也可以分别称它们为纬度和经度。 |
| 13 | phi循环从-½π 到 ½π,需要运行 VerticalCount 次。 |
| 14 | 此行计算在球体当前纬度上能放置圆的数量。计算方法和前面一致,除了需要计算当前纬度环绕球体一周的长度:2π·R·Cos(Φ) |
| 15 | 如果计算结果发现在某个纬度结果为0(就是在-½π和½π处),我们会遇到麻烦,因为在第17行使用了这个结果作为分母。谁都知道分母不能为0。但是在这两点我们知道至少可以放下一个圆。 |
| 18 | 这个循环本质上和第13行是一样的,不同点在于它使用的步进(theta_step)和数字范围({0.0 <= theta < 2π}。这里需要注意的点是theta的范围从0开始,但是不包括2π。如果 theta 的取值达到2π的话,在接缝处会产生一个重复的圆。阻止循环达到特定值的最好方法是把特定值减去一个值,在本程序我通过直接减掉一个超小的值(1e-8 = 0.00000001)达到这个目的。 |
| 19...21 | circle_center 保存要添加圆的中心点。 circle_normal 保存圆所在的平面的法线 circle_plane 保存生成的平面定义。 |
| 19 | 这一行需要很大的计算量,在这里不提供证明过程和工作过程。这是把球面坐标Φ 和 Θ转换为笛卡尔坐标x,y,z的标准方法。详细信息请参考 MathWorld.com |
| 20 | 一旦找到球体上对应当前 Φ 和 Θ 值的点,确定这一点的法线就是小小菜一碟了。球面上任何一点的法线就是当前点到球体中心点向量的反向量。这就是第20行的功能,我们把新找到的{x,y,z}点减去球体原点(在本例中总是(0,0,0))。 |
| 21...22 | 我们可以从平面上一个单点和一个法线向量定义一个平面,然后用一个平面和半径值定义一个圆。牛逼。 |
8.6.1 椭圆
椭圆本质上和圆差不多,只是椭圆需要两个半径。因为椭圆只有两个镜像对称平面,而圆具有旋转对称性(即无限数量的镜像对称平面),在椭圆的情况下,基平面的方向确实很重要。仅由原点和法向量指定的平面可以自由地围绕该向量旋转,而不会破坏任何初始约束。
下面的程序非常清楚地演示了基平面和椭圆的方向对应性。参考标准曲率分析图,如左图所示:

通过图片可以对样条曲线中不同曲率的范围有一个清晰的印象,但它不能很好地传达曲率的螺旋扭曲。近似线性的样条曲线部分往往具有扭曲的曲率,因为它们是从一个明确定义的折弯到另一个折弯的过渡。左图中的箭头表示这些扭曲区域,但仅从曲率图中很难推断出这一点。下面的程序将使用曲率信息通过一组椭圆放样曲面,这些椭圆已定向到局部样条几何的曲率平面。椭圆在曲线的折弯平面中具有较小的半径,而在垂直于折弯平面的半径较大。由于我们不会使用曲率的强度,而只会使用其方向,因此小细节将变得非常明显。
| 行 | 描述 |
|---|---|
| 16 | crosssections 用于保存所有椭圆的ID。我们需要保存所有添加的椭圆,以便后续输入为 rs.AddLoftSrf() 方法的参数。 crosssectionplane 会保存每个单独椭圆的基平面数据,已添加的平面不需要被记住,所以可以使用新产生的平面覆盖掉旧值。 你可能注意到我违反了[2.3.5 使用变量]章节的很多命名惯例。如果你有反对意见,请自己更正这些小问题。 |
| 19 | 我们以等参数间隔沿曲线向前走。这可能不是最好的方法,因为如果曲线是多重直线的话,在子线段上可能参数空间变化非常剧烈。这只是一个示例,所以我想保持代码尽量少,就使用这个不完美的方法了。前面例子里的循环我们使用了同样的技巧,以确保域的最大值不被包含在计算之内。通过减小循环终止条件最大值减去一个很小的数,避免了生成重复圆的问题。 |
| 20 | rs.CurveCurvature() 方法返回和曲率分析相关的整组数据。但是它会在线性线段上失效(在线性线段上,曲率半径为无限大)。 |
| 22...27 | 因此,在上述方法失效的情况下,需要按都老式方法收集标准信息。同时也需要一个 crvPerp 向量,因为没有任何返回值。我们可以使用最后一个返回的数据,或者在当前失效曲线分段外寻找一个本地平面,但是我用最简单的办法,直接使用z轴向量。 |
| 28...32 | 如果在t处曲线有曲率,就可以在返回曲率数据里取出需要的信息。 |
| 33 | 建立椭圆平面。 |
| 35...37 | 向文件内添加椭圆,并将椭圆曲线ID加入 crosssections 列表。 |
| 40...42 | 建立通过所有椭圆的放榜曲面,然后删除椭圆曲线。 |
8.6.2 弧线
因为弧线和圆没有太大区别,我想在这里介绍一些额外的知识,不失为一个好主意。这个额外的东西就是程序员所说的“递归”,毫无疑问它是我生活中最令人兴奋的玩意(我不经常出门)。递归是自我重复的过程。循环迭代重复执行相同的代码,递归函数调用自己,因此也重复执行相同的代码,但这个递归的过程是分层次的。实际上,递归并不简单。递归函数的成功案例之一是它们在二叉树中的实现,二叉树是当今世界许多搜索和分类算法的基础。我允许自己在递归的问题上走一点弯路,因为我非常希望你能体会到这个技术的简单性所带来的力量。不幸的是,递归是那些只有在你了解它的工作原理后,才会变得清晰可用的东西。
想象三维空间中的一个盒子,在其体积内包含了许多点。这个盒子内含一种单一的递归行为模式。递归函数对一个单一的条件语句求值:{当盒子体积内包含的点的数量超过一定的阈值时,就将其细分为8个更小的盒子,否则就将自己添加到文件中}。使用简单的If...Else语句很难实现这个功能。接下来,因为新创建的盒子也具有这种行为模式,它迸发出一连串的递归,产生如下图的效果:

在这个情况下,输入是一团大点云,形状像球体的上半部分。点云内部存在一个密集点,其点的密度高于平均水平。由于细分的逼近模式,递归级联的结果生成了这些美丽的盒子堆栈。试图在不使用递归的情况下实现这一结果,将需要大量的步骤和很多很多行的代码。 在我们能够进入酷的部分之前,我们必须写一些支持性的函数,这些函数--我不想说--再次涉及到测角术(角度数学)。
问题:使用起点、终点和起始方向添加一条弧线。正如你所知道的,在Rhino中可以直接用鼠标来完成这个操作。事实上,在Rhino中有14种不同的方法可以手动绘制弧线,但通过脚本添加弧线只有两种方法
- rs.AddArc(Plane, Radius, Angle)
- rs.AddArc3Pt(Point, Point, Point)
第一种方法与使用平面和半径添加圆非常相似,只是增加了扫掠角的参数。第二种方式也类似于使用3点系统添加圆,不同的是,弧线终止于第一和第二点之间。只给定A、B点位置以及起始切线向量,并没有直接的方法来添加弧线。我们必须写一个函数,将所需的起点-终点-方向方法转化为3点方法。在我们处理数学问题之前,让我们回顾一下它工作方式:

我们从两个点{A}和{B}以及一个矢量定义{D}开始。我们需要的是红色曲线,但现在我们还不知道怎么画这条线。请注意,如果{D}与{A}到{B}的直线平行或反平行,这个问题就没有解决办法。如果你想在Rhino中画一条这样的弧线,是不可能画出来的。因此,我们需要在函数中添加一些代码,当遇到无法解决的输入时就中止程序。
我们要找到结果弧线{M}中间点的坐标,然后我们才可以使用{A}、{B}和{M}的3点方法画出弧线。如左图示,弧线中点在与基线中点{C}垂直的线上。
弧线的中点也恰好位于向量{D}和基线向量的二等分线上。通过将两个向量单位化和相加,我们很容易在三维空间中找到两个向量的二等分线。在左图中,平分线已经指向了正确的方向,但仍然没有正确的长度。
我们可以用标准的 "Sin-Cos-Tan直角三角形规则 "计算出正确的长度:
我们要解决的三角形在右下角有一个90º角,a是基线和平分线之间的角度,三角形底边的长度是{A}和{B}之间距离的一半,我们需要计算斜边的长度({A}和{M}之间)。
a与三角形边长之间的关系是:
现在我们有了计算斜边长度所需的方程式。唯一剩下的问题是cos(a)。在关于矢量数学的段落中(6.2点和矢量),简要介绍了矢量点积是计算两个矢量之间角度的方法。当我们使用单位化的向量时,点积的余弦给我们提供了它们之间的角度。这意味着点乘法返回这些向量之间的角度的余弦。这是一个非常幸运的转折,因为这个角度的余弦正是我们要找的东西。换句话说,点积使我们不必完全使用余弦和反余弦函数。因此,{A}和{M}之间的距离是以下算式的结果:
(0.5 * rs.Distance(A, B)) / rs.VectorDotProduct(D, Bisector)
| 行 | 描述 |
|---|---|
| 1 | ptStart 参数表示弧线的起点, ptEnd 表示终点,vecDir 表示 ptStart 的方向。这个函数的功能和rs.AddArc3Pt()方法类似。它接受一组参数,如果成功,则返回创建的曲线对象的标识符。如果没有添加任何曲线,该函数不会返回任何东西--也就是说,返回值将是 None 。 |
| 2 | 创建基线向量(从{A}到{B}),用{B}减去{A}。 |
| 3 | 如果{A}和{B}是重合的,那么第2行的减法将导致一个长度为0的向量,不可能有解。实际上,有无限多的解决方案,所以我们也不知道该选哪一个。 |
| 6 | 如果vecDir与基线向量平行(或反平行),那么根本不可能有解决方案。 |
| 9...10 | 确保到目前为止所有的向量定义都是单位化的--也就是说,它们的向量长度值都是1。 |
| 12...13 | 创建二等分向量,并将其单位化。 |
| 15 | 计算平分线和方向向量之间的点积。由于平分线正好在方向向量和基线向量的中间(事实上,这是它存在的意义),我们也可以计算它和基线向量之间的点积。 |
| 16 | 计算ptStart与所需圆弧中心点之间的距离。 |
| 18 | 调整(单位化的)平分向量的大小以匹配这个长度。 |
| 19 | 使用起点、终点和中点参数创建弧线,返回ID。 |

我们要用这个函数来写一个递归的树生成器,树枝由输出弧线组成。树的形状由一组5个变量决定,由于递归范式的灵活性,很容易给树增加更多的行为模式。这个例子中实现树增长算法非常简单,不允许有很大的变化。
五个基本参数是:
- 增殖系数
- 树枝长度
- 树枝长度突变
- 树枝角度
- 树枝角突变
增殖系数是一个数字范围,表示每个分支末端生长树枝数量的最小值和最大值。这是一个完全随机的事情,这就是为什么它被称为"系数"而不是 "数字"。稍后会有更多关于随机数的内容。你可能已经猜到,树枝长度和树枝长度突变分别控制树枝的长度,和每一代树枝的长度的变化。树枝角度和树枝角度突变以类似的方式工作。
实际递归算法不会处理树枝的增加和弧线形状。这个功能由一个辅助函数完成的,在我们开始生成树之前,必须先写好这个函数。添加新树枝时遇到的问题是,我们希望树枝能平滑地连接到它们的父分支上。我们已经有了能画出切线连续弧线的程序,但还没有挑选终点的机制。在目前的植物生长方案中,树枝的生长由两个因素控制的:长度和角度。然而,由于一个树枝的末端可能有不止一个树枝在生长,所以需要有一定量的随机变化,以确保树枝看起来各不相同。

旁边的插图显示了用于树枝增殖的算法。红色曲线是分支弧线,我们需要在末端填充任意数量的树枝弧线。点{A}和向量{D}是由分支的形状决定的,但在长度和角度的限制范围内,我们可以自由地随机选择点{B}。所有可能的终点集合位于黄色锥体内。我们将使用一串向量方法来得到随机点{B}在黄色锥体内的位置:
-
创建一个与{D}平行的新向量{T}。
-
调整{T}的大小,使其长度在{Lmin}和{Lmax}之间。
-
突变{T},使之与{D}有一点偏差
-
围绕{D}旋转{T},使其方向随机化
| 行 | 描述 |
|---|---|
| 1 | origin 就是点{A}。 direction 就是向量{D}。 minDistance 和 MaxDistance 表示锥体长度方向的限值。 maxAngle 指定锥体的方向范围(单位是度,不是弧度)。 |
| 2...3 | 创建一个与 Direction 平行的新向量,并调整其大小至 MinDistance 和MaxDistance 之间。我在这里使用 random() 函数,它是一个Python的伪随机数前端。它总是返回一个介于0和1之间的随机值。 |
| 6 | 为了让 vecTwig 产生突变,需要用到一个平行向量。因为这里只有一个向量,我们不能直接使用 rs.VectorCrossProduct() 方法来产生这个向量,所以我们会构建一个平面并使用它的x轴。这个向量方向随机,但是总是和 vecTwig 保持垂直关系。 |
| 7 | 通过围绕平面x轴旋转一个随机角度,让 vecTwig 产生突变。 |
| 8 | 通过围绕 Direction 向量旋转,再次让 vecTwig 产生突变。这一次随机角度限定于0至360度之间。 |
| 9 | 创建由 Origin 和 vecTwig 推断出来的点。 |
维基百科提到关于递归主题的定义中,有一个是:"为了理解递归,人们必须首先理解递归"。这显然只是为了搞笑,但实际上这也是一个明确无误的事实。下面的程序完全符合递归的定义,同时也相当短。它会产生视觉上有趣的效果,但是很明显它只是一个简陋的植物生成器。要想完美模仿现实中的树,可以通过试错法进行探索。这个程序可能比本入门手册中的任何其他示例程序都更值得玩味。你可以按照你认为合适的方式,修改、变更、改变、扭曲和弯曲它,看会产生什么样的结果。
任何合法递归函数都必须遵守一套规则:
- 在程序结束前,必须至少对自己进行一次调用。
- 即使不对自己进行任何调用,也必须有一种退出方式
如果不满足第一个条件,该函数就不能被称为递归,如果不满足第二个条件,它就会调用自己,直到时间停止(或者说直到你的计算机中的调用栈内存耗尽)。
见证奇迹的时刻到了!
仅仅21行代码就能描述一整棵树的生长。
| 行 | 描述 |
|---|---|
| 1 | 函数参数说明。除了比较明显的两个参数 ptStart 和 vecDir,此函数还接收另外2个参数:1个元组和1个代数计数器。元组包含所有生长参数。因为多达7个参数,所以我不想一个一个输入就打包成元组。另外这样也比较方便更改参数,而不是每次更改参数就要去更改函数的调用。代数计数器参数是整数,告诉函数现在产生是第几代树枝。通常情况下,递归函数不需要知道它的深度,但是在这个程序里是个例外,因为代数是递归函数的结束条件。 |
| 2 | 为了可读性,我们对元组进行解包。在赋值侧,7个变量按顺序排列。参数元组包含以下值: |
| 6 | 如果当前代数超过了最大允许代数限制(在参数元组第3个数,解包并赋值给maxGenrations),函数会终止并跳出。因此,在递归继承上它会回退一步。 |
| 10 | 在这里我们复制了一份参数元组。在后面可以看到,如果我们生成新的树枝,那些树枝会调用新的突变参数,但是在当前 函数实例中,我们要求固定的参数。 |
| 11...12 | 对复制参数进行突变。即,用最大树枝长度乘以树枝长度突变值,对角度进行同样的处理。为了确保角度不至于失控,我们把角度突变限制于90度以内。 |
| 26 | maxN 为整数,表示即将生成树枝的数量。maxN 是从最小值与最大值之间随机挑选的( Props(0) 和 Props(1) )。random() 函数返回0和1之间的随机数,意味着maxN可以是这两个限值之间的任何一个数。 |
| 28 | 在这里我们使用已经定型的参数选择一个随机点。这里的长度约束是介于¼长度最大值与最大值之间。在整个宇宙里,没人告诉你要选择0.25这个数,完全是随机乱选的。但是它对最终生成树的外形有很大影响。意味着并没有办法精确的指定树枝的长度。这里有很大的变化空间与实验性。 |
| 31 | 创建属于这条分支的弧线。 |
| 32 | 如果 ptStart 和 ptGrow 之间的距离是0.0,或者如果 vecDir 与 ptStart >> ptGrow 平行,那么就不能成功添加弧线。我们需要及时发现这个问题。 |
| 33 | 我们需要知道新创建的弧线末端的切线。曲线的域由两个值组成(下限和上限)。 rs.CurveDomain(newTwig)(1) 将返回域的上限。这些调用以下函数结果相同:crvDomain = rs.CurveDomain(newTwig)vecGrow = rs.CurveTangent(newTwig, crvDomain[1]) |
| 34 | 沃了个去!老铁!一个函数调用了它自己!这就是递归函数!我们成功了! 需要搞清楚的是,这次调用是不同的。我们输入了新的参数给这次调用,意味着这个新函数实例,与当前函数实例的执行会有不同的结果。 |
可以用迭代(For 循环)的方式来写这个树形生成器。生成的树看起来差不多,但是代码会有很大不同(可能会多出很多行)。分支的添加顺序很可能也会不同。下面的树是典型的数字生成树,左边的树是用迭代法生成的,右边的树是用递归法生成的。注意分支顺序的不同。如果你仔细分析一下上一页的递归函数,你就会发现这种差异来自哪里...

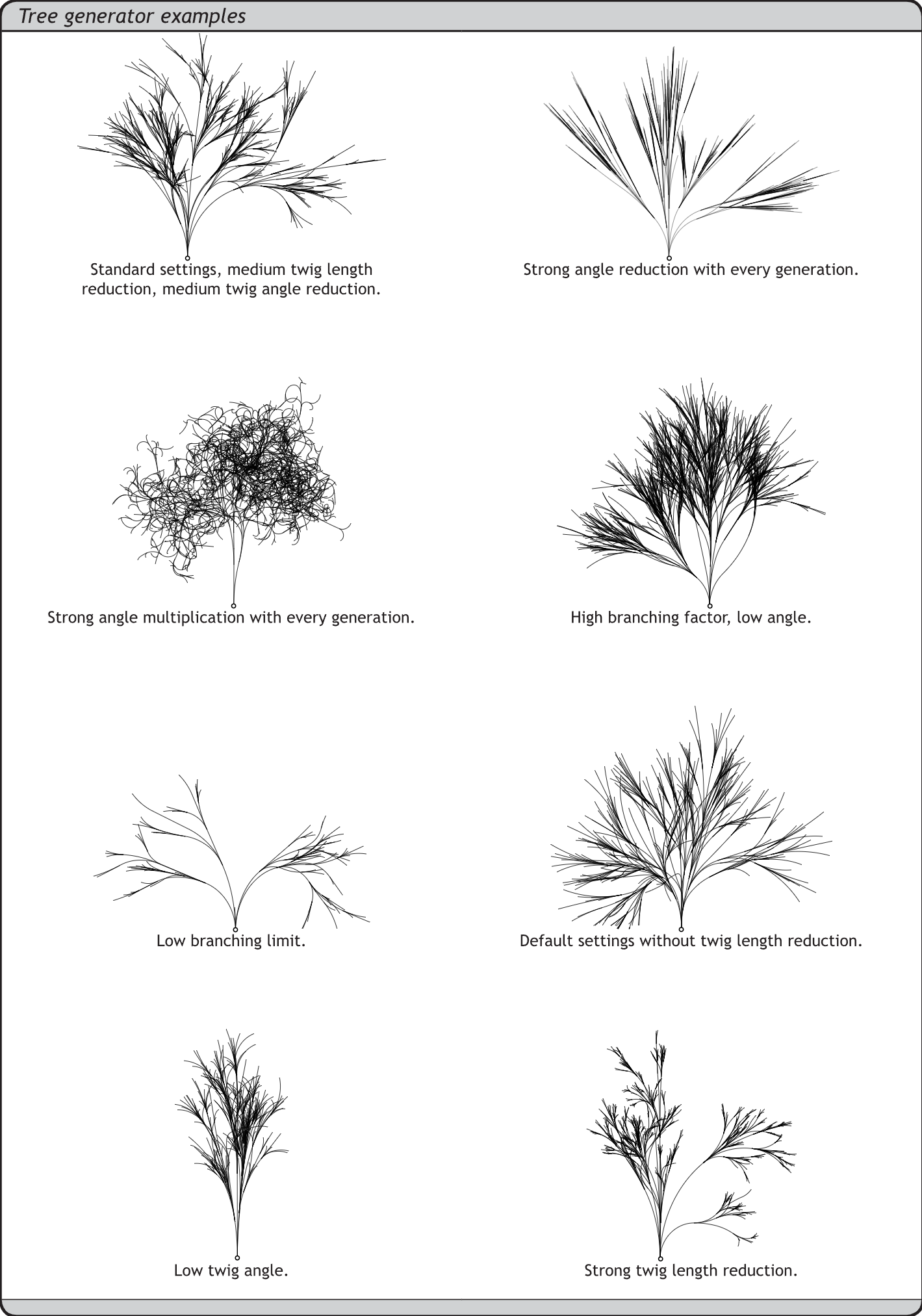
不同设置组合的一个小小比较表。请注意生成的树有很高的随机性。